欧拉角
2.4k words
欧拉角是 Leonhard Euler 引入的三个角度,用于描述刚体相对于固定坐标系的方向。
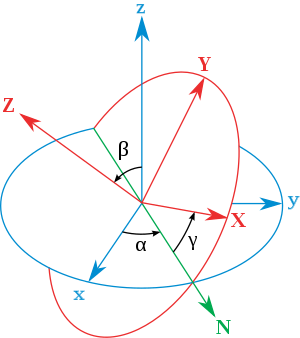
图1 欧拉角的几何定义
固定坐标系(x, y, z),也成为静态坐标系,世界坐标系,方向轴保持固定不变
旋转坐标系(X, Y, Z), 刚体自身的坐标系
交点线(N) ,xOy 平面与 XOY 平面的交线
一、几何定义(静态定义)
- α 或者 (φ) 是 x 轴和 N 轴之间的带符号角度( x 约定,也可以在 y 和 N 之间定义,称之为 y 约定)
- β 或者 (θ) 是 z 轴和 Z 轴之间的不带符号角度
- γ 或者 (ψ) 是 N 轴和 X 轴之间的带符号角度( x 约定)
α 角又被称之为进动角,β 角称之为章动角,γ 称之为自旋角。
值域范围
- α 与 γ 角度范围为 [0, 2π]
- β 角度范围为 [0, π]
特殊情况:当 β 为 0 或者 π 的时候会出现环架锁定现象。
二、动态定义
动态定义不关注交点线(N),而是通过描述绕坐标系的不同轴旋转来进行定义。根据选取的坐标系的不同可以区分为内旋(或称固有旋转)(intrinsic rotations) 和外旋 (extrinsic rotations)。
内旋约定
内旋是围绕刚体的XYZ坐标轴进行的基本旋转。因此在每次旋转后坐标轴的朝向都会发生改变。从 XYZ 与 xyz 重合开始,三个固有旋转的组合可以达到 XYZ 的任意方向。

图2 用欧拉角 ( α , β , γ ) = (−60°, 30°, 45°)表示的旋转,使用z-x'-z″内在旋转
比如图2可以通过内旋的方式进行描述。
- 物体绕 Z0 轴旋转 α 角度, 旋转后得到 X1Y1Z0
- 物体绕 X1 轴旋转 β 角度,旋转后得到 X1Y2Z2
- 物体绕 Z2 轴旋转 γ 角度,旋转后得到 X3Y3Z2

图3 欧拉角旋转动画
旋转矩阵表示内旋
R=Rx(α)∗Ry(β)∗Rz(γ)
如果用于左乘列向量,则表示绕轴 X−Y′−Z′′ 的内旋组合。
外旋约定
外旋是绕固定轴 xyz 进行的基本旋转。 XYZ 系统旋转,xyz 系统固定。从 XYZ 重叠 xyz 开始,三个外部旋转的组合可以达到 XYZ 的任意方向。
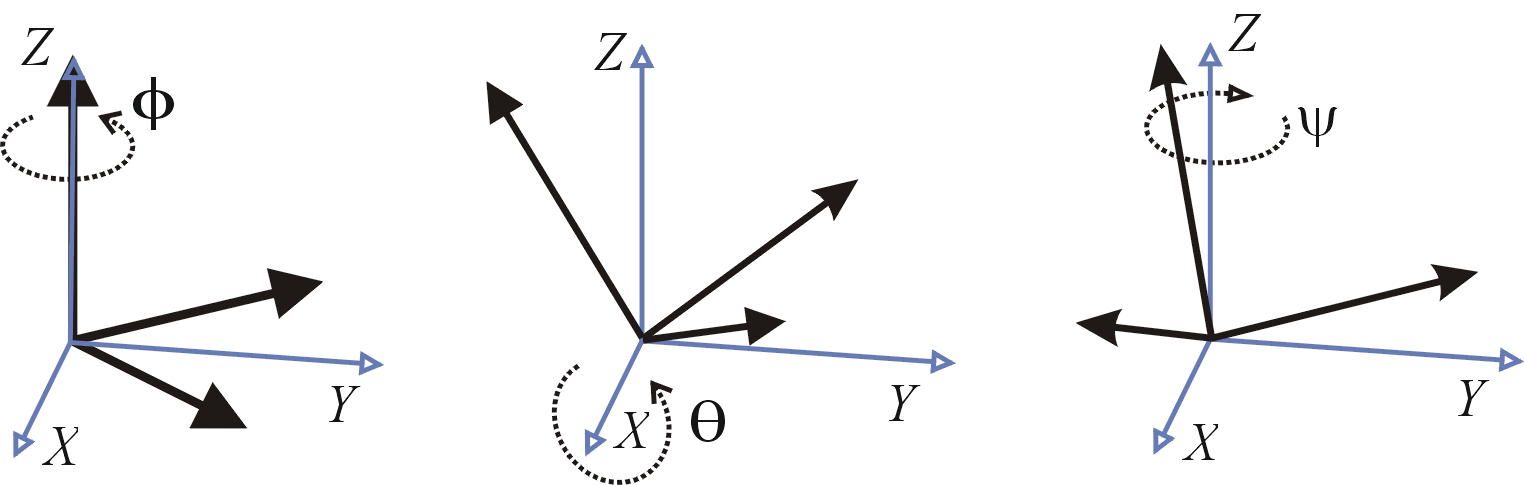
图4 使用zxz外旋转,由 (γ, β, α) = (45°, 30°, -60°) 表示相同的旋转
以图4为例(图中的XYZ其实应为xyz,没有找到更合适的图,就先用这个来表示下),可以通过下面的旋转方式获取到:
- 物体绕 z 轴旋转 γ 角度,X 轴与 x 轴现在成角度 γ
- 物体绕 x 轴旋转 β 角度,Z 轴现与 z 轴成角度 β
- 物体再次绕 z 轴旋转 α 角度
旋转矩阵表示外旋
R=Rz(γ)∗Ry(β)∗Rx(α)
如果用于预乘列向量,则表示绕轴 xyz的外旋组合。
内旋与外旋的转换
任何的外旋都等于角度相同但元素旋转顺序相反的内旋,反之亦然。例如:角度α、β、γ的内旋 X−Y′−Z′′相当于角度γ、β、α的外旋zyx。两者都可用矩阵 R=Rx(α)∗Ry(β)∗Rz(γ)表示。
证明过程可以参考
三、描述方式
欧拉角可以通过通过基本几何或者基本旋转(内旋,或者外旋)的组合来定义。
在不考虑使用两种不同的约定来定义旋转(内旋或外旋)的可能性下,存在12种可能得旋转轴序列,分为两组:
Proper Euler angles
也称为真欧拉角或者经典欧拉角。经典欧拉角中第一旋转轴和第三旋转轴是相同的,共有6种可能序列:
- z1−x′−z2′′ (内旋) 或 z2−x−z1 (外旋)
- z1−y′−z2′′ (内旋) 或 z2−y−z1 (外旋)
- x1−y′−x2′′ (内旋) 或 x2−y−x1 (外旋)
- x1−z′−x2′′ (内旋) 或 x2−z−x1 (外旋)
- y1−x′−y2′′ (内旋) 或 y2−x−y1 (外旋)
- y1−z′−y2′′ (内旋) 或 y2−z−y1 (外旋)
Tait–Bryan angles
也称为泰特-布莱恩角,万向角,航海角度,或者直接描述三个角(航向,海拔和高度或者偏航,俯仰和滚动) 。泰特-布莱恩角中三个角分别绕三个不同的轴转动,共有6种可能得序列:
- x−y′−z′′ (内旋) 或 z−y−x (外旋)
- x−z′−y′′ (内旋) 或 y−z−x (外旋)
- y−x′−z′′ (内旋) 或 z−x−y (外旋)
- y−z′−x′′ (内旋) 或 x−z−y (外旋)
- z−x′−y′′ (内旋) 或 y−x−z (外旋)
- z−y′−x′′ (内旋) 或 x−y−z (外旋) 内旋称之为:偏航,俯仰和滚动
上面12组为合法的欧拉角组,唯一的限制是任何两个相邻的旋转,必须围绕不同的转动轴旋转。
经典力学常用 zxz 顺规来设定,按第二个转动轴名,又简称之为 x顺规。量子力学、核子物理学、粒子物理学常用 y顺规来描述。而在航空航天工程学中常用 xyz顺规(Tait-Bryan 角)。
四、其他表达方式
旋转矩阵
任何方向都可以从初始方向开始组合三个基本旋转来实现。等价的,任何旋转矩阵 R 都可以分解为三个基本旋转矩阵的乘积。例如:
R=Rx(α)∗Ry(β)∗Rz(γ)
是一个旋转矩阵,可以用于表示围绕轴 zyx(按顺序) 的外旋的组合,或者围绕 X−Y′−Z′′(按顺序) 的内旋组合。
内旋右乘,外旋左乘。
详细的内容可以参考变换矩阵与坐标系变换中旋转矩阵部分
在应用旋转矩阵时需要确认3个点:
- 旋转顺序
- 内旋还是外旋
- 三个旋转角度
有这三个点的信息,便可以获知如何应用旋转矩阵。
四元数
四元数的定义及其性质,以下部分关注于欧拉角与四元数的转化。
直接给出转化公式
| 泰特-布莱恩角 |
|
| XYZ |
this.x=s1∗c2∗c3+c1∗s2∗s3;this.y=c1∗s2∗c3−s1∗c2∗s3this.z=c1∗c2∗s3+s1∗s2∗c3;this.w=c1∗c2∗c3−s1∗s2∗s3; |
| YXZ |
this.x=s1∗c2∗c3+c1∗s2∗s3;this.y=c1∗s2∗c3−s1∗c2∗s3;this.z=c1∗c2∗s3−s1∗s2∗c3;this.w=c1∗c2∗c3+s1∗s2∗s3; |
| ZXY |
this.x=s1∗c2∗c3−c1∗s2∗s3;this.y=c1∗s2∗c3+s1∗c2∗s3;this.z=c1∗c2∗s3+s1∗s2∗c3;this.w=c1∗c2∗c3−s1∗s2∗s3; |
| ZYX |
this.x=s1∗c2∗c3−c1∗s2∗s3;this.y=c1∗s2∗c3+s1∗c2∗s3;this.z=c1∗c2∗s3−s1∗s2∗c3;this.w=c1∗c2∗c3+s1∗s2∗s3; |
| YZX |
this.x=s1∗c2∗c3+c1∗s2∗s3;this.y=c1∗s2∗c3+s1∗c2∗s3;this.z=c1∗c2∗s3−s1∗s2∗c3;this.w=c1∗c2∗c3−s1∗s2∗s3; |
| XZY |
this.x=s1∗c2∗c3−c1∗s2∗s3;this.y=c1∗s2∗c3−s1∗c2∗s3;this.z=c1∗c2∗s3+s1∗s2∗c3;this.w=c1∗c2∗c3+s1∗s2∗s3; |
五、旋转的意义
数学意义:数学中的旋转常指主动旋转,例如向量的旋转
物理意义:物理学和工程中旋转可以为主动旋转,也可以为被动旋转,例如slam坐标系旋转
参考文档