最近的工作又涉及到了 3D 空间内的坐标系变换。虽然之前也有接触过相关的工作内容,但都只了解了其中的一部分。这次从头开始进行开发便有点捉襟见肘了。没得办法,从头开始学习下变换矩阵相关的内容了。本文将从简单的 2D 变换矩阵开始,扩展到 3D 变换矩阵。最后再应用变换矩阵进行坐标系变换。
变换矩阵(Transformation matrix)的定义可以从维基百科中查找到,这里就不在赘言。本篇文章会涉及到向量、矩阵等知识的内容。关于向量和矩阵的定义、性质以及计算等信息不在本文中描述。如有需要可自行查阅相关知识后再阅读后续内容。
在开始之前,需要先同步以下约定信息:
向量统一为列向量,即 ⎣⎢⎡xyz⎦⎥⎤ 或者写为行向量的转置 [xyz]T
原向量左乘变换矩阵得到目标向量,即 [XYZ]T=M∗[xyz]T
因使用列向量来表示,下文中的矩阵乘法除额外指出外均为左乘
一、2D 变换矩阵
缩放
缩放和旋转,需要留意的一点是都是基于原点的操作。以缩放为例,可以理解为将图形的左下角钉在原点,然后拉扯图形的右上角,造成图形的均匀形变。
缩放和旋转的这个性质也可以称为线性变换。
均匀缩放

图1 x,y缩放为原来的0.5
右侧的图形的 x 值和 y 值都缩放为原来的 1/2 。
可以很简单的写出缩放公式为:[x′y′]=[s00s]∗[xy]
非均匀缩放

图2 y不变,x缩放为原来的0.5
如果只有一个轴向的缩放,另一个轴向保持不变,比如上图的 x 值变为原来的 1/2, y 值保持不变。
此时的缩放公式为:[x′y′]=[sx00sy]∗[xy] ,在上方的案例中,sx=0.5 ,sy=1
切变

图3 切变
以水平切变为例。我们把图形想象成具有弹性,把下边固定,上边沿着 x 轴移动 a 距离后,得到水平切变后的图形。
分析切变前后的横纵坐标变化可以得到:
x′=x+a∗yy′=y
由此得出案例的缩放公式为:
[x′y′]=[10a1]∗[xy]
旋转

图4 旋转45°
说到旋转那就得要确定好旋转中心和旋转正方向。如果没有特殊声明的情况下,默认旋转的中心点是原点,旋转的正方向是逆时针方向。比如上图可以描述为图形旋转45°。

图5 旋转
以上图旋转 θ 角度为例:
a 点旋转前的坐标为[10] 旋转后的坐标为[cos(θ)sin(θ)]
b点旋转前的坐标为[01] 旋转后的坐标为[−sin(θ)cos(θ)]
将旋转前后的 a,b 点坐标带入公式[x′y′]=[m11m11m12m22]∗[xy]后可以得到,旋转矩阵为
R(θ)=[cos(θ)sin(θ)−sin(θ)cos(θ)]
线性变换
观察缩放矩阵和旋转矩阵,它们都可以写成类似下式的形式:
x′=a∗x+b∗yy′=c∗x+d∗y
采用矩阵的形式便是:
[x′y′]=[acbd]∗[xy]
类似这种形式,我们将之称为线性变换。
平移、仿射变换与齐次坐标

图6 平移
缩放变换和旋转变换都是线性变换。但还有一种与他们不同的变换 - 平移变换,他的不同之处在于是非线性的(也被称为仿射变换)。
以上图的平移变换为例,左边图形的x 坐标平移 tx,y 坐标平移 ty 得到右侧的图形。
我们可以很简单的写出坐标的变换公式,如下:
x′=x+txy′=y+ty
观察上述的公式,我们似乎不能简单的写为:
X′=M∗X
而是要在此基础上添加一个常量部分:
X′=M∗X+b
写为矩阵的形式便是:
[x′y′]=[acbd]∗[xy]+[txty]
我们并不希望将平移变换当成一个特殊的变换,处理的方式和缩放变换、旋转变换不同。那有没有方式可以将平移变换与缩放变换、旋转变换统一起来,都是 X′=M∗X 的形式呢?
答案是有的,那便是引入齐次坐标。
齐次坐标
齐次坐标是在原来2维坐标的基础上添加一个维度
引入齐次坐标后,上述的平移矩阵变可以写为如下的形式:
⎣⎢⎡x′y′w′⎦⎥⎤=⎣⎢⎡100010txty1⎦⎥⎤∗⎣⎢⎡xy1⎦⎥⎤=⎣⎢⎡x+txy+ty1⎦⎥⎤
简单的解释下为什么点添加的值为 1,而向量添加的值为 0。
以 x 坐标的计算为例,一个点在经过平移变换时,计算为 :
x′=1∗x+0∗y+1∗tx
可以看到添加的值 1 的作用便是应用 tx的平移变化。
而向量是指向的方向,对一个向量应用平移变化,得到的应该还是向量本身。所以向量添加的齐次坐标为 0。
仿射变换
形如 [x′y′]=[acbd]∗[xy]+[txty]的形式,我们将之称为仿射变换。仿射变换与齐次坐标下的形式是等价的。
变换矩阵
引入齐次坐标后,上述的三个变换可以改写为齐次坐标的形式
缩放矩阵
S(sx,sy)=⎣⎢⎡sx000sy0001⎦⎥⎤
旋转矩阵
R(θ)=⎣⎢⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0001⎦⎥⎤
平移矩阵
T(tx,ty)=⎣⎢⎡100010txty1⎦⎥⎤
逆变换

图7 变换

图8 逆变换
假设一个图像如图7左侧一样经历了一系列变换得到图7右侧的形状。所经历的变换为:
X′=M∗X
那想要将形状还原为原来的形状,如图8一样,那所经历的变换便是图7变换的逆变换:
X=M−1∗X′
其中 M−1为变换 M的逆矩阵。
旋转矩阵性质
以2维旋转矩阵为例:
R(θ)=[cos(θ)sin(θ)−sin(θ)cos(θ)]
R(−θ)=[cos(θ)−sin(θ)sin(θ)cos(θ)]=R(θ)T
而 R(−θ)=R(θ)−1
所以得到 R(−θ)=R(θ)T=R(θ)−1
缩放、旋转与平移的顺序

图9 如何变换
面对如图9的变换是怎么得到的呢?对于一个复杂的变换,我们可以将其进行拆解,拆解为基础的缩放变换、旋转变换和平移变换,并对这些基础的变换进行组合。从图9中我可以看出包含旋转变换和平移变换,那是要先进行平移变换还是先进行旋转变换呢?我们接下来分别进行尝试。
先平移变换后旋转变换

图10 先平移后旋转
我们可以先对原图形进行平移变换得到图10的中间图形,然后在对其进行旋转变换。在进行旋转变换的时候需要留意一点,旋转是基于旋转中心(原点)的操作,在旋转后发现图形不是我们想要的结果。
先旋转变换后平移变换

图11 先旋转后平移
那我们先对图形进行旋转变换得到图11的中间图形,然后对其进行平移变换,得到了目标图形。
我们可以从矩阵的角度来理解这个问题
图10的操作可以简写为:
X′=R(θ)∗T(tx,ty)∗X
图11的操作可以简写为:
X′=T(tx,ty)∗R(θ)∗X
而矩阵是不满足乘法的交换律,也即:
R(θ)∗T(tx,ty)=T(tx,ty)∗R(θ)
由此可见缩放、旋转和平移变换的顺序十分重要,一般应用的过程中会按先缩放,后旋转,最后平移的方式来进行组合。
变换的合成与分解
An(...A2(A1(X)))=An∗...∗A2∗A1∗⎣⎢⎡xyz⎦⎥⎤
对于坐标 X 应用变换A1后应用变换A2 … 一直应用到变换 An, 可以将
An∗...∗A2∗A1 合成得到变换
M,之后便可对每个坐标应用变换
M,这个性质在进行3D渲染时十分有用。
在图11的过程中,我们应用到了变换的分解,将一个复杂的变换分解成简单的变换。
主动变换和被动变换
主动变换
Active or ablibi trnasformations。坐标系基底不变,物体进行缩放、旋转和平移等操作,矩阵左乘。
被动变换
Passive or alias trnasformations。物体不动,坐标系发生缩放、旋转平移等操作,矩阵右乘。
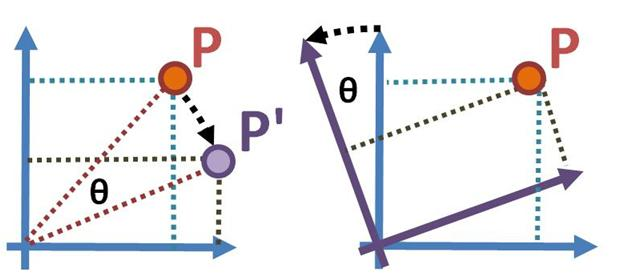 图12 主动变换和被动变换
图12 主动变换和被动变换
在主动变换(上图左)中,点P通过绕固定坐标系原点顺时针旋转角度θ变换为点P ‘ 。在被动变换(上图右)中,点P保持固定,而坐标系绕其原点逆时针旋转角度θ。主动变换后P ‘相对于原始坐标系的坐标与P相对于旋转坐标系的坐标相同。
主动变换和被动变换互为逆过程。
二、3D 变换矩阵
上面我们详细的讲解了2维的变换,对于3维变换可以类比来进行推导。
齐次坐标
三维的变换矩阵为以下的形式:
⎣⎢⎢⎢⎡x′y′z′1⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡adg0beh0cfi0txtytz1⎦⎥⎥⎥⎤∗⎣⎢⎢⎢⎡xyz1⎦⎥⎥⎥⎤
缩放矩阵
S(sx,sy,sz)=⎣⎢⎢⎢⎡sx0000sy0000sz10001⎦⎥⎥⎥⎤
旋转矩阵
分别绕z、y、z轴的旋转矩阵如下:
Rx(α)=⎣⎢⎢⎢⎡10000cos(α)sin(α)00−sin(α)cos(α)00001⎦⎥⎥⎥⎤
Ry(β)=⎣⎢⎢⎢⎡cos(β)0−sin(β)00100sin(β)0cos(β)00001⎦⎥⎥⎥⎤
Rz(γ)=⎣⎢⎢⎢⎡cos(γ)sin(γ)00−sin(γ)cos(γ)0000100001⎦⎥⎥⎥⎤
将其进行组合后的旋转矩阵为(绕自身轴转动的主动旋转,使用右乘表达):
R(α,β,γ)=Rx(α)∗Ry(β)∗Rz(γ)
注意针对欧拉角的不同约定会有不同的描述形式,上述的描述xyz顺规的泰特-布莱恩角形式。其中绕 x 轴转动称为 roll,绕 y 轴转动称为 pitch,绕 z 轴转动称为 yaw。
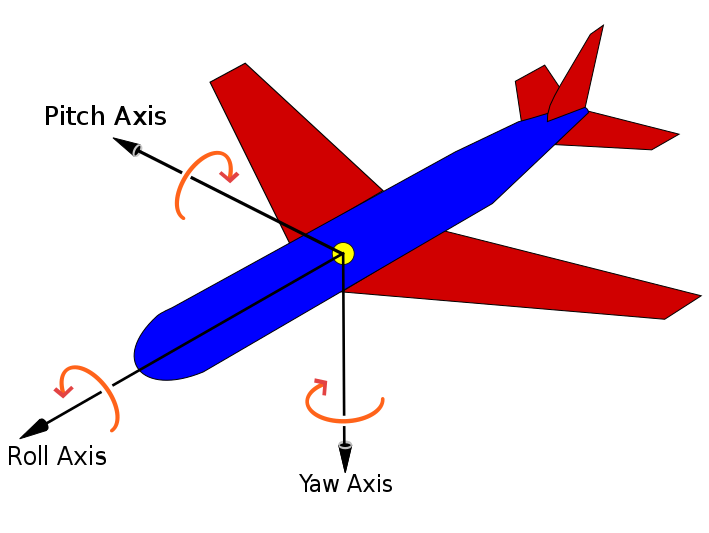 图13 xyz顺归的泰特-布莱恩角
图13 xyz顺归的泰特-布莱恩角
旋转方向
左手坐标系采用左手螺旋定则来确定正方向,右手坐标系采用右手螺旋定则来确定正方向。
平移矩阵
T(tx,ty,tz)=⎣⎢⎢⎢⎡100001000010txtytz1⎦⎥⎥⎥⎤
变换矩阵
M=T(tx,ty,tz)∗R(α,β,γ)∗S(sx,sy,sz)
代表先进行缩放变换,再进行旋转变换,最后进行平移变换。
三、坐标系变换
接下来分别在 2D 空间和 3D 空间演示下如何求解变换矩阵。
2D 坐标系变换
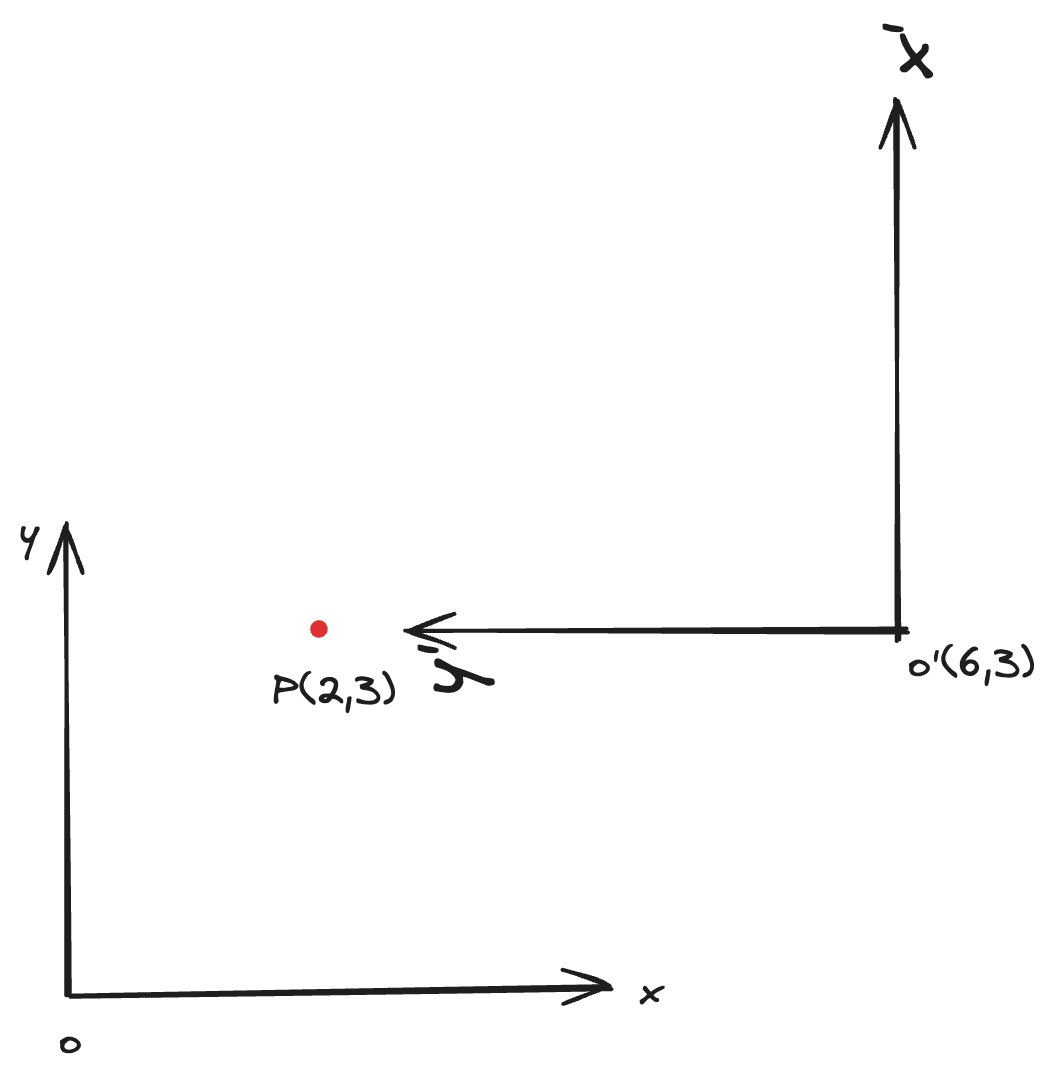 图14 2D坐标系转换示例
图14 2D坐标系转换示例
如图14所示,原有坐标系 Axoy以及坐标系内的一点 P(2,3),现需要求出P(2,3)在 Bx′o′y′坐标系中的坐标P′(x′,y′),计算公式如下:
P′=MA−>B∗P
求解变换矩阵MA−>B的过程,其实是描述如何由 Bx′o′y′坐标系变换到 Axoy坐标系的过程(这里描述的是主动变换的过程,而 Axoy 坐标系变换到Bx′o′y′ 坐标系是被动变换,两者之间互为逆过程)。
坐标系 Bx′o′y′ 进行平移变换 T(−6,−3) 得到 Bx′oy′′
坐标系Bx′oy′′ 旋转 -90° 得到 Axoy
P′=R(−90)∗T(−6,−3)∗P
得到
MA−>B=⎣⎢⎡0−10100001⎦⎥⎤∗⎣⎢⎡100010−6−31⎦⎥⎤=⎣⎢⎡0−10100−361⎦⎥⎤
带入P′=MA−>B∗P可得
P′=⎣⎢⎡0−10100−361⎦⎥⎤∗⎣⎢⎡231⎦⎥⎤=⎣⎢⎡041⎦⎥⎤
由原图观察可得 P′(x′,y′) 坐标确实为[04]
PS: P′=R(−90)∗T(−6,−3)∗P 为主动变换的描述,采用被动变换的描述可以等价为 P′=(T(6,3)∗R(90))−1∗P=R(90)−1∗T(6,3)−1∗P=R(−90)∗T(−6,−3)∗P
3D 坐标系变换

图15 3D坐标系转换示例
如图15所示,原有坐标系 Axyz以及坐标系内的一点 P(2,3,0),现需要求出P(2,3,0)在 Cxyz坐标系中的坐标P′(x′,y′,z′),计算公式如下:
P′=MA−>C∗P
求解变换矩阵MA−>C的过程,其实是描述如何由 Cxyz坐标系变换到 Axyz坐标系的过程主动变换描述)。
观察坐标系的变化,发现只有旋转变换,所以计算公式变为:
P′=RC−>A∗T(0,0,0)∗P=RC−>A∗P
接下来看如何计算旋转矩阵。
直接找到坐标系Cxyz 到坐标系Axyz的旋转变化有点困难,我们可以加一个中间坐标系Bxyz。
计算旋转矩阵按旋转参考系的不同可以分为内旋(绕自身轴)和外旋(绕固定轴),分别进行计算如下:
绕自身轴
由观察可知:
坐标系Cxyz绕自身 x 轴旋转 180°得到坐标系Bxyz
坐标系Bxyz绕自身 y 轴转动 90° 得到坐标系 Cxyz
两次旋转右乘得到旋转矩阵
RC−>A=Rx(180)∗Ry(90)
=⎣⎢⎢⎢⎡10000cos(α)sin(α)00−sin(α)cos(α)00001⎦⎥⎥⎥⎤∗⎣⎢⎢⎢⎡cos(β)0−sin(β)00100sin(β)0cos(β)00001⎦⎥⎥⎥⎤
=⎣⎢⎢⎢⎡00100−10010000001⎦⎥⎥⎥⎤
绕固定轴:
由观察可知:
坐标系Cxyz绕固定轴 x 旋转 180° 得到坐标系Bxyz
坐标系Bxyz绕固定轴 y 转动 -90° 得到坐标系 Axyz
两次旋转左乘得到旋转矩阵
RC−>A=Ry(−90)∗Rx(180)
=⎣⎢⎢⎢⎡cos(β)0−sin(β)00100sin(β)0cos(β)00001⎦⎥⎥⎥⎤∗⎣⎢⎢⎢⎡10000cos(α)sin(α)00−sin(α)cos(α)00001⎦⎥⎥⎥⎤
=⎣⎢⎢⎢⎡00100−10010000001⎦⎥⎥⎥⎤
可以看到两种计算方式得到的旋转矩阵是相同的。带入到公式 P′=RA−>C∗P 中,得到 P′坐标为⎣⎢⎡0−32⎦⎥⎤。